|
The origins of the AQM-38 lie in the RP-70
(XKD4R-1) radio-controlled drone which Northrop developed
in 1957. A purely developmental model,
the drone was never produced in this form but did lead to the production of
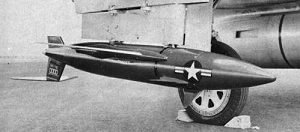
its successor. In the late 1950's, Northrop's Radioplane division developed
the RP-76 a high-performance, rocket powered, radio controlled,
recoverable subscale target drone, destined to be launched from the USAF's
F-89 Scorpion. It was used for surface-to-air, and air-to-air missile firing
practice. Like the earlier Crossbow,
the RP-76 had a cigar-shaped fuselage and guidance provided by an autopilot
with RC backup, but it was much
smaller and was powered by a solid rocket engine, with an exhaust nozzle just
behind each wing. It had a unique set of flying surfaces: shoulder mounted
wings with a slight sweepback, three forward control fins underneath each side
of the nose, a peculiar downward-mounted fixed horizontal "tee" tail
located below the ventral vertical tail, and smaller dorsal fin.
Main sources: |
USAF / Army designation: RP-76, AQM-38A Powerplant: 1 x 160 N (37 lb) Aerojet 530NS35
(AGM-38A) Significant date: 1958 The RP-76 entered service with the US Army in 1959, usually launched from F-89 Scorpion aircraft as a target for surface-to-air missiles. It was powered by an Aerojet solid-fuel rocket, giving a flight at high subsonic speed for almost 10 minutes. Controlled by an automatic system in flight, the missile could also be guided by radio. The fuselage was fitted with a fixed horizontal tailplane below the tail and three forward control fins. A two stage parachute allowed it to land once the mission was completed. Radar reflectivity augmentation equipment (i.e. to increase the radar signature) included a Luneberg lens which provided reliable passive reflectivity at a minimum cost as a target for the Nike-Ajax, Nike Hercules, and Hawk missiles. The RP-76 used a Northrop RPTA-1 tracking aid system. Smoke generating and night light kits were used for visual tracking. The RP-76 was powered by an Aerojet solid-propellant rocket engine with twin thrust nozzles canted 15 degrees outboard in the horizontal plane; this produced a thrust of 160 N (37 lb) for about 9 minutes. The drone had two rocket exhausts at the sides of the fuselage, and could reach a speed of Mach 0.94. The RP-76 was controlled in flight by an automatic control system with optional command control override by radio command, and could be recovered by a two-stage parachute system. The control vanes formed an integral part of the fuselage. Recovery was done with a three foot diameter ribbon brake parachute and a second stage 24 foot diameter ring slot main canopy were deployed at a predetermined altitude. Beginning in 1959, the RP-76 was used by the US Army to train surface-to-air missile crews at US and Far East target ranges, mainly with the MIM-3 Nike-Ajax. Strangely enough, throughout these Air Force/Army guises the RP-76 apparently never received any designation other than its company designation until 1963, when it was redesignated as AQM-38A. The AQM-38A appears to have been largely made of plastics, and carried radar enhancement devices to simulate larger aircraft. It appears to have been replaced by the Beech AQM-37, discussed later, and was phased out in the early 1970s. During the summer of 1960, at the White Sands Missile Range in New Mexico, an AQM-38A climbed to a height of 72,500 feet, attaining a speed of Mach 1.03 during the flight. Later, a new high performance version, designated RP-76E, attained a speed in excess of Mach 2 at an altitude of 80,000 feet. The US Navy also produced a modified version, the RP-78, which had a higher thrust rocket motor allowing supersonic speeds of up to Mach 1.25. This was used for air-to-air missile training of US Navy all-weather interceptor fighter pilots at the Pacific Missile Range, Point Magu, California. Interestingly, the Navy's RP-78 was apparently never designated as KD4R-1 (or -2) but retained its company designator, although it was clearly a production development of the XKD4R-1. The RP-78 was redesignated as AQM-38B in the 1963 reformed tri-service system. Since mid-1959, over 2,000 of the AQM-38A/B targets were ordered by the US Armed Forces. Population: over 2000 Specs & performance: Crew/passengers: unmanned |



 Radioplane RP-76 / RP-78
Radioplane RP-76 / RP-78This website is conceived,
designed and maintained by BIS © 2006-2010 BIS Productions
Although every effort is made to make the information accurate, a mistake is
always possible.
Feel free to send an e-mail to correct or update any page of this site.